2015年度実施予定のテーマです。こんなことができま す。
a) 発泡スチロール材のための加工ロボットによる加工実験と評価 −STLデータへの対応−
b) CAD/CAMに基づくエンドミルの微小振動生成と加工性能評価
c) エンドミル回転数の自動制御(三菱6自由度ロボットRV1Aを使用)
d) ミドルウェアORiN2を用いたアカデミックロボット VE026Aの位置・姿勢制御
e) 複数の移動ロボットのネットワーク制御(オープンキャンパス用)
f) コンピュータビジョンを応用したワークの自動寸法計測
g) メカトロニクス実験システムの構築
h) ロボットのインテリジェント制御系の設計(MATLABによるシミュレーション実験)
i) 加速度センサを用いた多脚ロボットの姿勢制御
j) 工作機械の遠隔監視制御システム
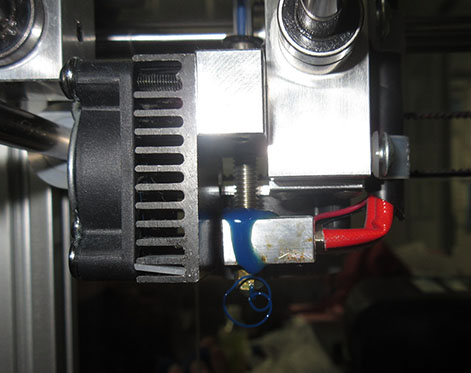
k) 3Dプリンターを使ったロボットパーツの製作 ノズル部の異常に注意しましょう。
研究課題
礼儀正しくマナーを守って最後まで研究を頑張れた卒研生のみなさんと、サポートいただいた大塚先生、ほんとうにお疲れさまでした。
綺麗なPPTを使って、失敗することなく練習通り、工学系の学生として恥ずかしくないとてもよいプレゼンで卒研発表できていました。
| Dr. | 大塚 章正 | |
| B4 | 岸本 聖矢 | 6自由度シリアルリンク機構の製作と運動学に基づく制御 |
| B4 |
竹下 和宏 |
OpenGLを用いた工具パスビューアの作成とPCDに基づく3次元加工 |
| B4 |
吉本 慎悟 |
STLデータを用いた加工ロボットの工具経路の生成と加工実験による評価 |
| B4 | 栗田 進吾 | OpenGLを用いた多軸制御用NCデータビューアとNC・CLSコンバータの作成 |
| B4 | 義永 諒 | OpenGLを用いたDXFデータビューアとDXF・STL・CLSコンバータの作成 |
| B4 | 福島 和明 | 3Dプリンタの加工条件の検討と、デザインツールとの連携による意匠性モデルの造形 |
就職活動事前連絡表は、使用済み用紙の裏を
使ってください。(ホワイトボードの月予定表にも書き込んでおいてください)
就職活動連絡が出ていないものは、研究室で卒業研究や就職活動を行うな
ど、研究室を基点に活動してください。
3/26(土)-29(火) ICIAE2016参加 "Neural Network-Based Inverse Kinematics for an Industrial Robot and Its Learning Method"
3/17(木) 卒業論文最終提出締切日:遅くともこの日までにtex様式で作成し、WS教室で印刷し提出すること。新しい様式を竹下君が持っていますので、これに移すと見栄えがよいでしょう。なお、事前に内容のチェックを
受けること。加えて、一行日誌、卒研ノート、研究データを収めたCD(CDは渡します)も遅くともこの日までに提出してください。
3/18(金) 午後:Latex説明 -> H28は卒業研究がスムースに進むように早めに説明します。
3/17(木) 吉本君によるRV1Aの操作方法の引継ぎ作業(教示モードと自動運転モード) -> 山根さんへ。明日はLaTexを説明します。卒業式まで作業してもらってすみませんでした。また、吉本君、福島君は遅くまで安?水?まで無理を言ってすみませんでした、とても楽しかったです。みなさんの活躍を祈っています。ところで偶然にも会長先生とお会いしました。
3/15(火) 10:00〜 福島君による3Dプリンターの使い方の引き継ぎを行います。 吉本君、福島君、大塚先生、謝恩会に来ていただき、ありがとうございました。
3/14( 月) 卒業研究最終日: 栗田君、福島君の卒論及びCDなど提出予定、竹下君の卒論確認予定、 15:00〜山根君、大学院研究の打ち合わせ(CAD/CAM関連)
全員の卒業論文を受け取りました。お疲れ様でした。
3/12(土) 栗田君、竹下君 卒論指導
竹下君、吉本君、最終の加工実験とさまざまな条件の検討ををありがとう。
指示通りに進めてもらって、計画以上の成果となりました。今年の国際会議で共同発表しましょう。
KinectとPCDを組み合わせたリバースエンジニアリングは奥が深く、今後ますます重要になっていきますので、新大学院生、新4年生にも担当してもらう予定です。
3/11(金) 義永君、吉本君、岸本君の卒業論文、卒論ノート、CDなどを全ての資料を受け取りました、1年間お疲れさまでした。
シリアルリンクとMATLABを使ったテーマの卒研は継続する予定です。サーボモータを検討し、関節の剛性を高めたいところです。
ファナックの産業用ロボットを使ったアプリケーション開発ができそうですので、RV1AでのイーサネットのUDPパケットを使った開発ノウハウを活かしたいところです。
デンソーの産業用ロボットを使ったORiNアプリケーションの開発も本格的に開始しますので、院生に参加してもらう予定です。
3/10(木) 第3回 追加実験、卒業論文などのチェック
3/8(火) 第2回 追加実験、卒業論文などのチェック
研究室が使えないために図書館で行いたいと思います。9:00から栗田君ですが、他の希望者は適当に順番を決めてください。
3/2(水) 第1回 追加実験、卒業論文などのチェック
卒論はまずは目次を固めますので案ができたら随時見せてください。OKをもらったらその構成で書いてください。
2/24(水) 卒研発表、お疲れ様でした。
2/19(金) までにA4要旨と卒研発表PPTのチェックを受けてOKをもらってください。
2/9(火) 10:00〜前回の報告会で指示された内容(研究、PPTのブラシアップ)について、その後のインパクトのある進捗・改善内容を報告する。
追加実験などを指示しているテーマは動画など実験結果を見せてください。実機デモでもOKです。
A4要旨と卒論の作成も並行して取り組みましょう。JABEE以外の学生も一行日誌と卒研ノートは忘れずに書いてください。
★JABEE履修生は卒研の6単位が修得できたとして、JABEE自己点検表の各項目で目標をクリアできていることを確認しておくこと。
2/5(金) この日の12:00までに一度、A4要旨のチェックを受けること。また、栗田君は来週がいいでしょう。
2/4(木) 10:00〜前回の報告会で指示された内容(研究とPPT)について、その後のインパクトのある進捗・改善内容を報告する。特に、追加実験などを指示しているテーマは動画など実験結果を見せてください。実機デモでもOKです。A4要旨と卒論の作成も並行して取り組みましょう。JABEE以外の学生も一行日誌と卒研ノートは忘れずに書いてください。
1/28(木) 10:00〜 前回の報告会で指示された内容(研究とPPT)について、その後のインパクトのある進捗・改善内容を報告する。A4要旨と卒論の作成も並行して取り組みましょう。
21st International Symposium on Artificial Life and Robotics AROB 21st
2016, January 20-22, 2016
B-Con PLAZA, Beppu, JAPAN
http://isarob.org/symposium/ 竹下君、
学会発表デビュー
●日時:平成28年 1月18日(月) 16:30〜17:30
場所:5号館1階 5106教室
題目: 金属3Dプリンタの現状と将来展望
講師: 京極 秀樹 先生
現職: 近畿大学工学部ロボティクス学科・教授
講演概要: 最も古い金属加工は鍛造で、紀元前8000年ごろの銅による使用が始まりだと言われている。その後紀元前6000年ごろに鋳造が開始された。この二つの製法は今でも重要な金属加工の製法であるが、今では完全に機械化され、原理は同じでも高度にハイテク化されている。このようなハイテク分野を担う金属加工において、最も新しい製法と言えばレーザー焼結法である。粉末状からレーザーで焼き固める製法で、従来の鍛造や鋳造、削り出しなどに比べ材料の無駄もなく、データから一体成形できる。本講演ではAM(Additive
Manufacturing)技術の分類と特徴や、ASTMによる分類、AMプロセスの概要、造形プロセスの実際、粉末材料、産業用3Dプリンタ開発の必要性、先進活用事例、次世代産業用3Dプリンタの開発状況について紹介する。
1/13(水) 9:30〜 研究報告会(各自これまでの研究内容をPPTにまとめて12分程度で発表する)
「研究の背景」、「研究の目的」、「研究内容」、「得られた成果」 を必ず含めること。実験を伴う研究では動画を含めること。なお、発表は学籍番号順。
1/7(木)〜 研究室再開日
12/25(金)〜 冬休み
12/24(木) 10:00〜 竹下君、AROBの発表リハーサル(12分程度でプレゼンしてください)
。この日は終日質問受け付けます。
依頼事項:各自の机、周辺の掃除・整頓、いる方の部屋の掃き掃除などをして、新年を迎えましょう。
12/22(火) 10:00〜 前回の報告会で打ち合わせた内容について、その後のインパクトのある進捗内容を報告する。この日は終日質問受け付けます。
The 4th International Conference on Robot Intelligence Technology and
Applications (RiTA2015) RiTA2015-1
RiTA2015-2
12/11(金) 14:45〜 前回の報告会で打ち合わせた内容について、その後のインパクトのある進捗内容を報告し、翌週の計画を述べること。
12/9(水) 13:30〜 前回の報告会で打ち合わせた内容について、その後のインパクトのある進捗内容を報告する(報告者:栗田)。
12/8(火) 10:00〜 前回の報告会で打ち合わせた内容について、その後のインパクトのある進捗内容を報告する。 欠席:栗田、吉本
3種類の木の材料を買っています。硬いので最初は送り速度を小さくして様子を見ながら加工してください。
12/1(火) 10:00〜 前回の報告会で打ち合わせた内容について、その後のインパクトのある進捗内容を報告する。
11/27(金) 15:00〜 竹下、義永(11/25の報告分)
11/26(木) 13:00〜 前回の報告会で打ち合わせた内容について、その後のインパクトのある進捗内容を報告する。11/25に報告できなかったものが対象(吉本、岸本)
int byte ;
bytes = serialPort1.BytesToRead; //受信バッファ内のデータのバイト数を取得します
11/25(水) 13:00〜 前回の報告会で打ち合わせた内容について、その後のインパクトのある進捗内容を報告する。発表者:福島、栗田。
●一度内海研の研究風景を見学してください。私が訪問する他大学の卒研の雰囲気はあのような感じです。
11/18(水) 13:00〜 前回の報告会で打ち合わせた内容について、その後の進捗内容を報告する。
11/13(金) 15:00〜16:30 前回の報告会で打ち合わせた内容について、その後の進捗内容を報告する。PPTを工夫するなど分かりやすい説明を心がけること。
11/4(水) 13:00〜 前回の報告会で打ち合わせた内容について、その後の進捗内容を報告する。
10/28(水) 13:00〜 前回の報告会で打ち合わせた内容について、その後の進捗内容を報告する。
10/27(火) 厚狭高校 出前講義「機械」
10/23(金) 15:00〜15:30 研究室の掃除、整理・整頓
10/20(火) 13:00〜 前回の報告会で打ち合わせた内容について、その後の進捗内容を報告する。
10/15(木) 13:00〜 前回の報告会で打ち合わせた内容について、その後の進捗内容を報告する。発表者:、竹下、吉本、福島
10/6(火) 13:00〜 前回の報告会で打ち合わせた内容について、その後の進捗内容を報告する。
9/30(水) 13:00〜 前回の報告会で打ち合わせた内容について、その後の進捗内容を報告する。
●日時: 平成27年 9月25日(金) 16:30〜17:30
場所: 5号館1階 5108教室
福祉ロボットと作業移動ロボットの研究開発
講師: 山本 元司 先生
現職: 九州大学大学院工学研究院 教授
講演概要:
九州大学制御工学研究室では社会的要請等から医療福祉ロボットおよび実用面の重要性から作業移動ロボットの研究を中心にロボティクス・メカトロニクス関連研究を広範に行っている.
本講演では特に,JSTプログラムにより実施した柔軟で軽量な歩行アシストスーツと,褥瘡(じょくそう)防止ベッドの産学官連携研究事例を紹介する.
また,床面清掃ロボット,ガラス窓清掃ロボット,天井裏作業ロボットなどの作業移動ロボットの研究開発についても,産学連携研究の視点から説明・紹介する.
9/24(木) 13:00〜 前回の報告会で打ち合わせた内容について、その後の進捗内容をPPTを使って報告する。進路が内定している学生には大きな進捗成果を期待する。発表者:、竹下、岸本
9月11日(金)、12日(土):佐賀学園高等学校体験学習が行われます。 11日に行われる体験学習の全4テーマのうち、永田研究室はメカトロニクス基礎実験(場所:2号館3階)を担当します。
研究室のみなさん、プログラミング指導をありがとうございました。
9/9(水) 14:00 〜研究室の中間発表会(全員:発表時間 15分で、これまでの卒研内容を発表します。前日発表できなかった学生のみ(栗田、吉本))
9/8(火) 14:00 〜研究室の中間発表会(全員:発表時間 15分で、これまでの卒研内容を発表します。発表は学籍番号順です。)
9/3(木) 13:00 〜14:00 体験学習の準備(LEDイルミネーション実験、各自説明できるようになりましょう) 欠:福島(当日までに予習しておくこと!)
8/5(水) 13:00〜14:30 卒業論文を書くためのtexを説明します(永田)。texのインストール方法を説明します(大塚先生)。
8/4(火) 15:00〜16:20 前回の報告会で打ち合わせた内容について、その後の進捗内容をPPTを使って報告する。
日時: 平成 27年 8月 4日(水) 16:30-18:00
場所: 5106教室
講師: 溝口 博 先生
現職: 東京理科大学理工学部機械工学科 教授
題目: 「対人協調機械研究の紹 介」
講義概要: 人の相手ができる機械」の実現を目指した取り組みについて紹介する。そのための人をみつける技術、人を感知する技術、人に働きかける技術とこれらの応用ついて、具体例を示しながら述べる。
8/3(月) 13:30〜14:30 メカトロニクス実験装置のチェック(永田、竹下)
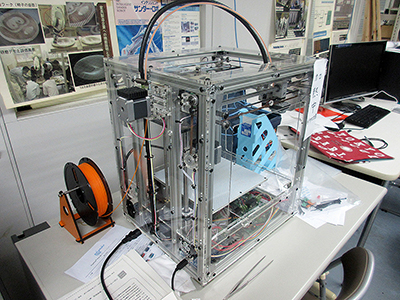
・7月26日(日)と8月1日(土)がオープンキャンパスです。例年どおり、4年生の卒研の一環として(プレゼン練習の場として)、研究室内での展示デモを行います。→ みなさんのデモと説明ありがとうございました。
テーマ: 「内部が見えるスケルトンタイプの3Dプリンター」を使ったロボットパーツの製作
場所: 永田研究室
プレゼンター: 卒研生全員
内容: 「内部が見えるスケルトンタイプの3Dプリンター」を使って簡単なロボットパーツを加工しています。3Dプリンターによる積層造形
(Additive Manufacturing)を実際に見てみましょう。
7/22(水) 13:00〜14:30 前回の報告会で打ち合わせた内容について、その後の進捗内容をPPTを使って報告する。
研究室内でオープンキャンパスの準備をします。
7/15(水) 13:00〜14:30 前回の報告会で打ち合わせた内容について、その後の進捗内容をPPTを使って報告する。
7/8(水) 13:00〜14:30 前回の報告会で打ち合わせた内容について、その後の進捗内容をPPTを使って報告する。
吉本君
/* structures *///stlファイル内の一つの三角パッチ
typedef struct triangle_tag {
float normal[3];
float vertex1[3];
float vertex2[3];
float vertex3[3];
unsigned int dummy ;
float plane_d;//value of d : ax+by+cz+d=0 ;
} triangle;
triangle *stl_data = new triangle[n]; // 動的なバッファである stl_data を確保
7/1(水) 13:00〜14:30 前回の報告会で打ち合わせた内容について、その後の進捗内容をPPTを使って報告する。
6/26(金) 13:00〜14:30 の機器制御は休講です。
6/25(木) 13:00〜14:30 に機器制御の補講を行います。
6/24(水) 13:00〜14:30 前回の報告会で打ち合わせた内容について、この一週間の進捗内容をPPTを使って報告する。
その後、義永君、栗田君ののプログラミング指導
6/19(金) 今日の機器制御の講義で使用したPPT(微小振動を発生させる方法。SICE SI 2014で発表した内容です。)
6/18(木) 12:40〜13:50 前回の報告会で打ち合わせた内容について、この一週間の進捗内容をPPTを使って報告する。
6/12(金) 13:00〜14:30 の機器制御は休講です。
6/11(木) 13:00〜14:30 に機器制御の補講を行います。
6/10(水) 13:00〜14:30 前回の報告会で指示した内容について、この一週間の進捗内容をPPTを使って報告する(各自、10分間以上は説明すること)。この日に当てられた4人の学生(竹下、吉本、福島、岸本)は、Technical English(example-20,
22, 23, 24) をそれぞれ読んで訳した。
6/4(木) 13:00〜14:30 前回の報告会で指示した内容について、この一週間の進捗内容をPPTを使って報告する(各自、10分間以上は説明すること)。この日に当てられた2人の学生は、Technical English(example-14, 17,) をそれぞれ読んで訳した。
2013年にVisual C#環境において、 OpenCvSharp を使ったプログラム例です。Form1.cs
5/29(金) 竹下君 シングルウインドウにCLデータが描画された。義永君、栗田君は参考になると思います。
5/28(木) 13:00〜14:30 前回の報告会で指示した内容について、この一週間の進捗内容をPPTを使って報告する(各自、10分間以上は説明すること)。この日に当てられた2人の学生は、Technical English(example-12, 13) をそれぞれ読んで訳してもらいます。
▼ 岸本君へ: USBシリアルインターフェイス AGB65-USBを使って通信ソフトを作る際、ドライバをインストールする必要があるようです。下記URLを読んでセットしておいてください。
http://www.robotsfx.com/robot/AGB65_USB.html
5/22(金) Visual C#のフォームアプリケーションでのシリアル通信について説明した。
5/21(木) 13:00〜14:30 前回の報告会で指示した内容について、この一週間の進捗内容をPPTを使って報告する(各自、10分間以上は説明すること)。Technical English(example-8):栗田
5/19(火) 例えば、http://www.buildinsider.net/small/opencv/03
に沿って、OpenCVを使うためにVisual C++環境設定すると問題なくサンプルのとおりの赤い矩形領域を描画できます。ただし、デバッグモードで設定し、確認しました。
5/18(月) 13:30〜 STLファイルを使った三角パッチベースのパスによるロボット加工法を説明した。また、加工開始時のCLデータの編集方法を指導した。
吉本君へ:CreoでSTLファイルを保存するときのパラメータについて調べてください。
▼ 加工ロボットの制御ソフトにおいて、姿勢制御のPゲインとIゲインの値にゼロが設定できなかった。このため、「姿勢制御を行う」のチェックボタンを設け、CLデータ内の姿勢情報を無視できるようにした。初期値はこれらのゲインを0にセットし、姿勢制御を行わないようにしている。
5/16(土) スポーツ大会です。テーブル上の用紙に種目などを記入してください。
5/15(金) 10:00〜11:30 5/13の報告会に参加できなかった学生(福島、栗田、)は、この一週間の進捗内容をPPTを使って報告する。
・午後の機器制御の講義では、Visual Studio C++ 環境でのシリアル通信ソフトの作り方を説明します。
5/13(水) 13:00〜14:30 この一週間の進捗内容をPPTを使って報告する(各自、10分間以上は説明すること) 欠:福島、栗田、。この日に当てられた2人の学生は、Technical English(example-6):岸本、Technical English(example-7):吉本、それぞれ読んで訳してもらいます。各自当てられても訳せるように準備しておきましょう。
5/11(月) 岸本、栗田、福島各PCにCreo3.0をインストール。コンバータのSTLデータ → CLデータの変換について説明した。欠:義永
5/7(木) 13:00〜14:30 この一週間の進捗内容をPPTを使って報告する。今後は一人一題程度英文の和訳を報告してもらいますので、これまでの分は訳しておきましょう。欠:竹下、義永、
申請中のCreoは来週になりそうです、インストールはもうしばらく待ってください。
14:40〜16:10 5110にて機器制御の補講を行います。
▼岸本君が使っているPCには購入したVisual Studio 2012がインストールされています。Ngomさんが使っていたPCにも購入したVisual
Studio 2012がインストールされていますので、使いたい学生は申し出ること。
4/29(水) 13:00〜14:30 4年生はこの一週間の進捗報告をPPTを使って説明する。加工ロボットでの加工実験を行いますので、5cm×5cm程度のサイズでモデルを作成し、0.5mm程度のピックフィードでCLデータを準備しておきましょう。
材料への位置決め方法を説明します。配布している基礎技術英語の日本語訳本は図書館にあるので、各自自分の訳をチェックしておくこと(場所は吉本君に聞いてください)。
▼Microsoft Visual Studio Professional以上で作成されたC/C++プロジェクトをExpress版でビルドしたとき下記エラーメッセージが表示されることがありますが、
Express版にはMFC(Microsoft Foundation Class)本体は含まれないため、MFCを利用しているプロジェクトには対応できないので注意のこと。研究室ではExpress版は使わない方がよいでしょう。
"・・・cannot open include file "afxres.h"
▼Visual Studio Community 2013では、今までExpress Editionでは使えなかったMFCなどの機能が使えるようです。
4/24(金) 15:00〜15:30 栗田君はこの一週間の進捗報告をPPTを使って説明する。
研究室のPC6台にイラストレータをインストールしてもらう。イラストレータで描いたデータをDXFデータに変換すると、Creoに取り込めると思います。
Windowsインストールありがとうございました、その後Updateも終わりました。
OpenNI2 関連は、 http://structure.io/openni からダウンロードできるようです。Xtion
のドライバもあるようです。
4/22(水) 13:00〜14:30 4年生はこの一週間の進捗報告をPPTを使って説明する。このあと、CLデータを使ってRV1Aの動かし方を説明します。欠:栗田
4/15(水) 13:00〜14:30 4年生はこの一週間の進捗報告を口頭で説明する。もちろん、PPTを使ってもよい。報告者:栗田、竹下、吉本、義永、福島
卒業研究の履修登録を忘れずに! ポートフォリオを至急提出すること!
4/14(火) 竹下君とOpenGLのインストールを行う。Windows7の32ビットOS、64ビットOSともに、同一のファイル(.h,
.lib, .dll)でOKだった。
4/13(月) 15:00-15:30 岸本君進捗報告(4/15が就活のため)
4/10(金) Technical English(example-13).jpg, Technical English(example-14).jpg,
Technical English(example-17).jpg, Technical English(example-20).jpg を配信した。日本語に訳すこと。
4/9(木) 13:30〜14:30 (1)Windows Visual Studio Community 2013 ダウンロード&インストール説明、(2)NC
Viewer説明、(3)Converter のビルド方法説明。Converterを使えば、CLデータやSTLデータをNCデータに変換できます。参加者:吉本、義永、岸本、竹下
4/8(水) 16:10〜新1年生が研究室に来ますので、簡単な自己紹介をしてもらいます。
4/6(月) 13:00〜14:30 CAD/CAM, 3Dスキャナー、3Dプリンターについて簡単に説明します(永田、大塚) 参加者:竹下、吉本
デモを行った3Dプリンターのフィラメントの径は1.75 mm である。推奨のプリンティング温度は190〜200℃であり、造形テーブルの温度は60〜70℃である。このフィラメントは、FDM(Fused
Deposition Modeling: 熱溶解積層法)方式の3Dプリンタで使用可能である。フィラメントとしてABS、PLA(Poly-Lactic
Acid)それぞれの特徴を調べておくように。
4/3(金) JABEE履修生の自己点検書のチェックを行います → 義永、竹下3名のチェック終了。Technical English(example-7).jpg,
Technical English(example-8).jpg, Technical English(example-12).jpg を配信した。
3/25(水) 研究室の掃除と整理、機械工学実験室のPCの入れ替え作業などを行います。英文和訳練習 Technical
English(example-6).jpg を配信する。
岸本君は他のメンバーに聞いておいてください。
卒研ノートと一行日誌は毎日丸テーブルの上に提出してください。各自にアドバイス、チェック印をしますので。
卒研ノート、一行日誌は、ペンを使って記入すること。
Pro/ENGINEER 操作マニュアル
新卒業論文様式.zip tex の使い方 texのインストール方法
卒業研究一行日誌.xls :-> 就職活動は記入できません、卒業研究に取り組んだ時間や内容を記入のこと。各自、一行日誌、および研究ノートに記録を残してもらいます。
就職活動事前連絡票.doc -> 事前に提出 してから就職活動に参加してください。(ホワイトボー
ドの月予定表にも書き込んでおいてください)
卒業研究の単位修得には、卒業研究一行日誌、卒業研究ノート、卒業研究の概要(ワードで作成)、卒業論文 (texで作成)、卒研発表用PPTの提出が必要になります。
2006 2007 2008 2009 2010 2011 2012 2013 2014
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}